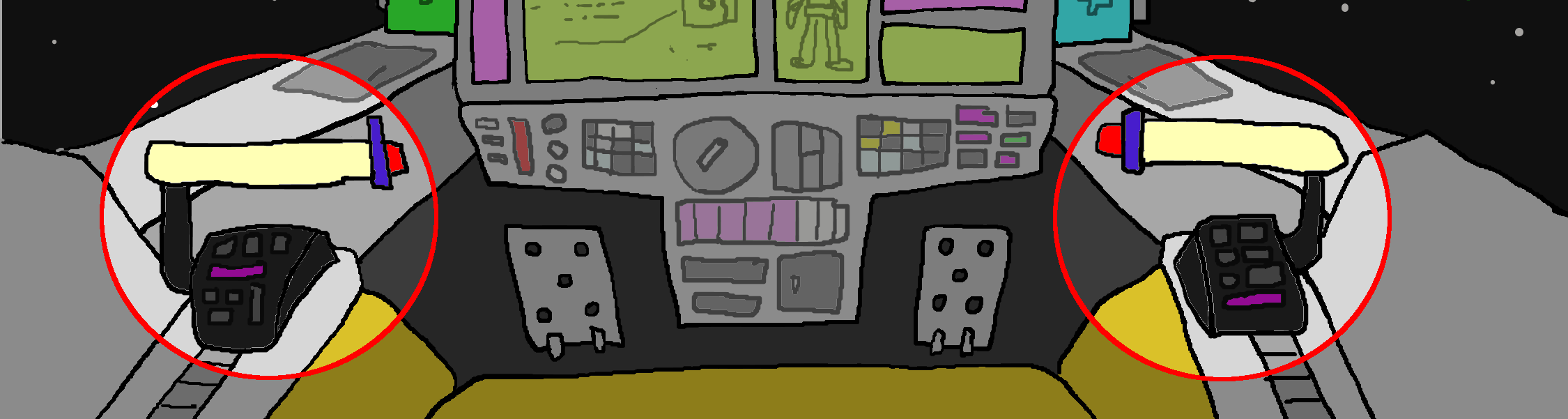
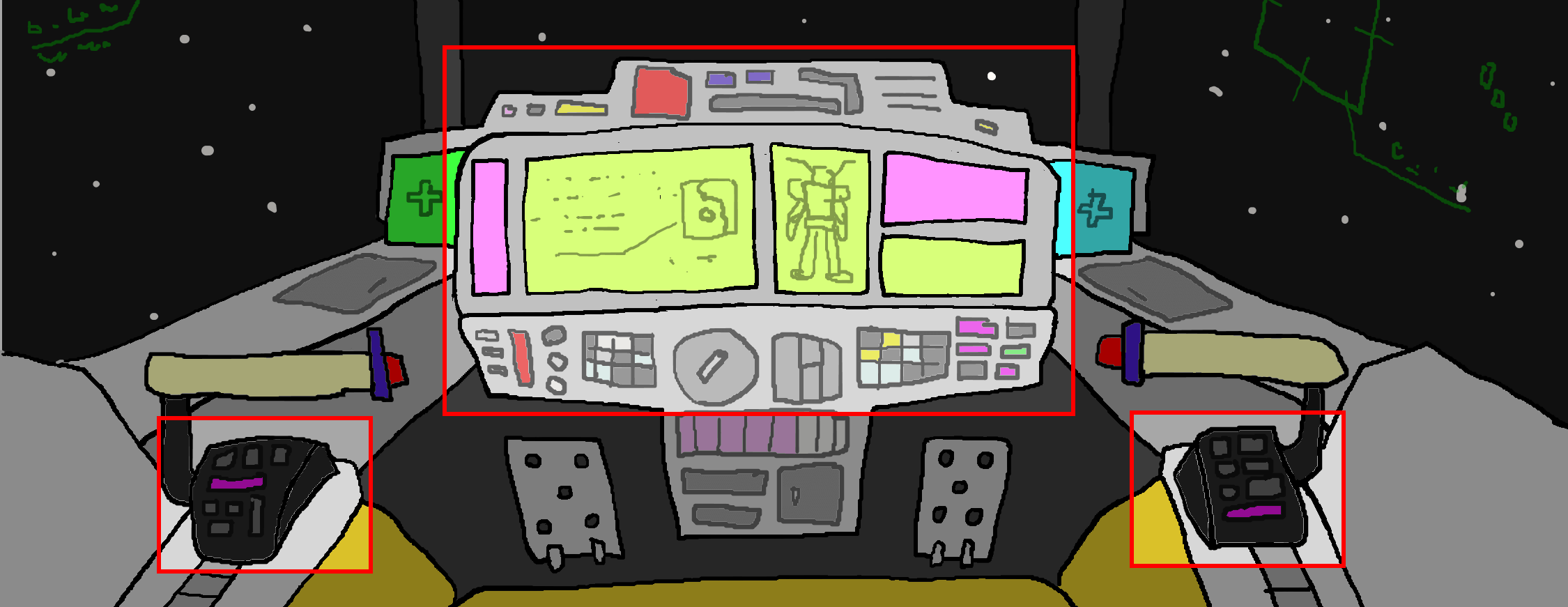
RGM-79ジムを操縦するに当り、コックピットを見てみると、
- 左右に1つずつあるレバー
- 両足に1つずつあるペダル
で操作できる様になっています。
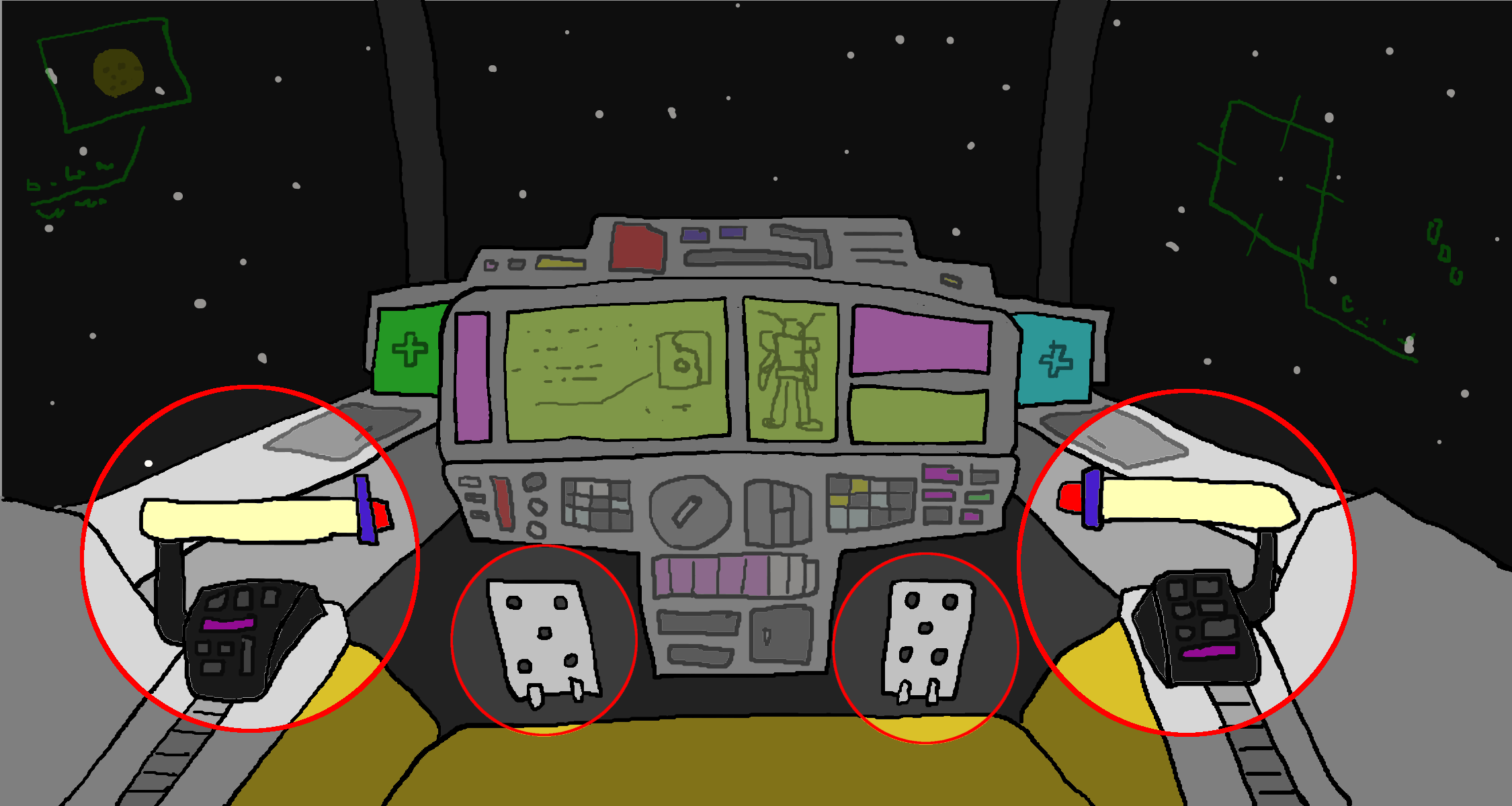

基本的には赤い円で示している、この4つです。

・・・コれだけで本当に動かせるのカ?
四肢を持ち、格闘や射撃・ドッグファイトも同時に行う事もあるモビルスーツを動かすには、あまりにもシンプル過ぎやしなか。。
きっと、そう考える人も多い事でしょう。
以前、こんな記事を書きました。
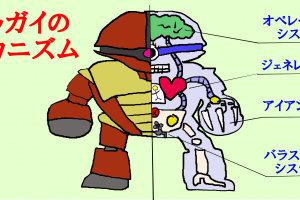
この記事にあるように、モビルスーツの細かな動きの殆どがオペレーションシステムで制御されていて、パイロットの操作を広くサポートしています。

助かるよぉ~。
但し オペレーションシステムはパイロットからの指示無しに、勝手に動き出す事はありません。
……そうです。
どんなに優れたオペレーションシステムを備えていても、モビルスーツの性能を生かすも殺すも、総じてパイロットの腕次第なのです。
では、そのパイロットの技量や判断を機体に伝えるコックピットの成り立ち、ルーツとは?
そして、モビルスーツの具体的な操作方法とは、どの様な物なのでしょうか?
コックピットの成り立ち
ジオン公国軍の場合
ジオン公国軍はモビルスーツ開発に於けるパイオニアです。
そのモビルスーツは、スペースコロニーの建設重機を基に開発が進められ、基本的な操作方法はその延長線上にあります。

MW-01
モビルワーカーと呼ばれていた、モビルスーツの前身の試作機です。
重機感ありますね~。
ただ、ジオン公国軍は重工業メーカー同士を競争させ、高性能モビルスーツを開発・製造させる環境を意図的に作っていた為、メーカーが異なるモビルスーツは当然操作方法も異なっています。
従って パイロットは機種毎の順応が必要となり、それに時間を要してしまう事で、配置転換や作戦進行の柔軟性を欠いてしまうと言う問題が発生。
この事から、一年戦争末期に発動された「統合整備計画」では、コックピットの規格統一が図られました。
地球連邦軍の場合
一年戦争緒戦。
ジオン公国軍のモビルスーツを駆使した戦略の前にコテンパンにされた地球連邦軍。
連邦もV作戦を発動させ、ジオンを凌駕するモビルスーツの開発に着手します。
試作機RXシリーズは戦闘データの回収を重視した為、脱出ユニットを兼ねた戦闘機を内包するコアブロックシステムを採用。
機体が破壊されてもコアファイターで逃げてデータを保守しまス。

この事で、RXシリーズは戦闘機のコックピットが流用される事になりました。
- 左右1つずつのレバー
- 中央にある操縦桿
- 足元3つのペダル
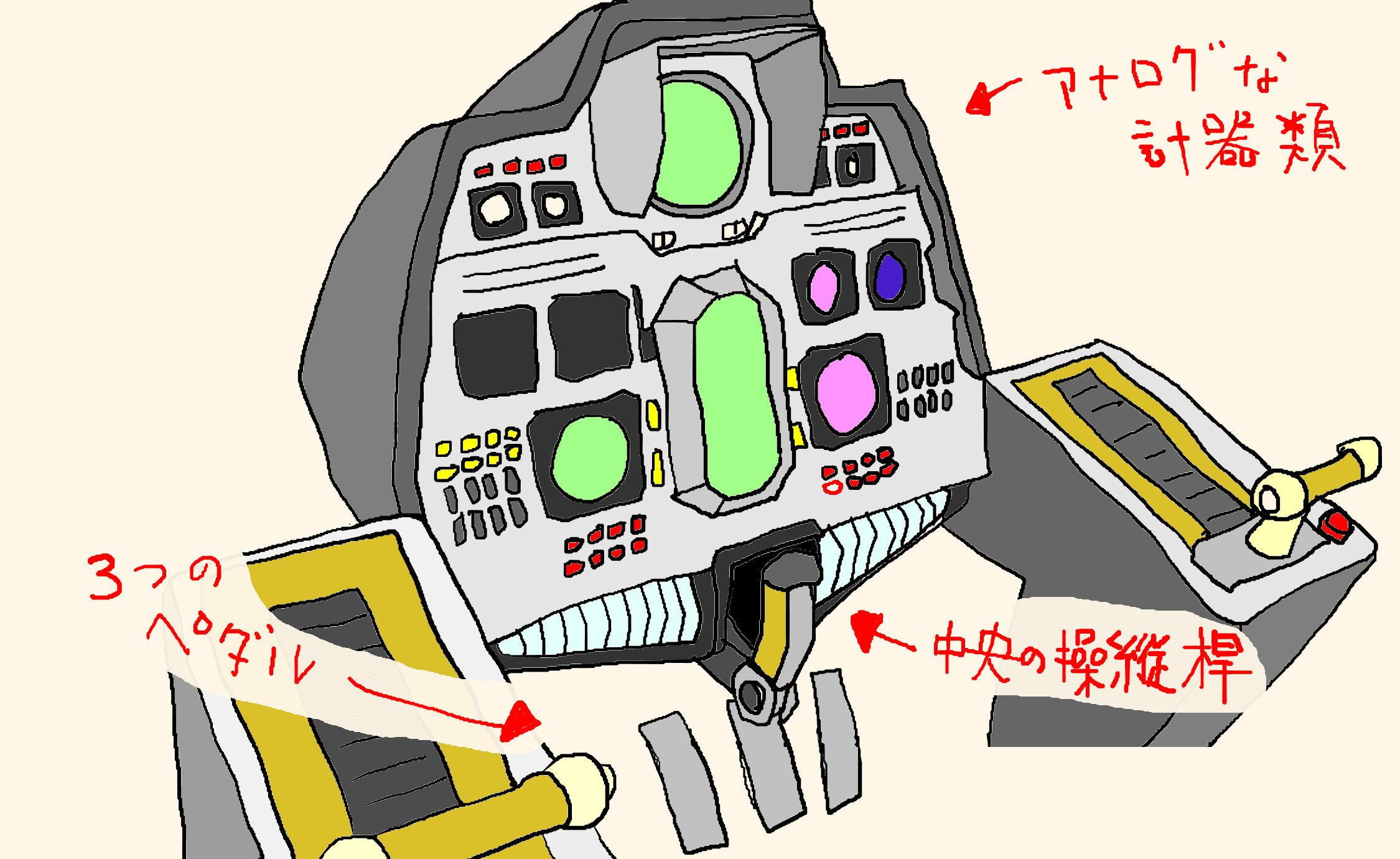
中央の操縦桿は、コアファイター時にパイロットの手元に移動しまス。
やがて ガンダムの戦闘データ回収の目処が立ち、量産を控えたRGM-79ジムはコスト圧縮も課題であった為、コアブロックシステムの廃止が決定。
これを受け、中央にあった操縦桿が不要となり、ペダルも1つ減って冒頭に述べた配置のコックピットになりました。
量産が本格化する前にロールアウトされた、
- RGM-79ジム【E】(初期生産型)
- RGM-79ジム【G】(陸戦型ジム)
これらは、ペダルが6つもあったそうです。
頭こんがらがりそう。
偶然にも・・・。コックピット内の配置。
- ジオンの「統合整備計画」
- 連邦の「V作戦モビルスーツ量産計画」
これらのコックピット内の配置の落ち着き処は偶然にも、
- 左右に1つずつあるレバー
- 両足に1つずつあるペダル
だったと言われています。
汎用性や規格統一を意識し、色々と試行錯誤した結果が両軍同じだったという事は、これが「最適」と言えるのかも知れません。
一年戦争終戦後は勝利した地球連邦がジオンの技術も接収し、良い所を積極的に取り入れたりしたので、この配置のコックピットが基本形として後々まで引き継がれていきました。
一部の試験機やカスタム機などはこの通りではないヨ。
モビルスーツの基本操作
では 本題の、
- モビルスーツを動かすには、どの様な操作をするのか?
冒頭に述べた通り、オペレーションシステムが状況を判断して細かな動作は自動的にやってくれます。
それに加え、選択が迫られる事項も適切なコマンドを抽出し提案してくれるので、パイロットは判断するだけです。
これらの事で、モビルスーツは基本的に2つのレバーと2つのペダルの操作だけで動かす事ができます。
シンプルな分、適性と繊細な操縦技術、空間認識力などが求められますね。
パイロットの腕の見せ所。
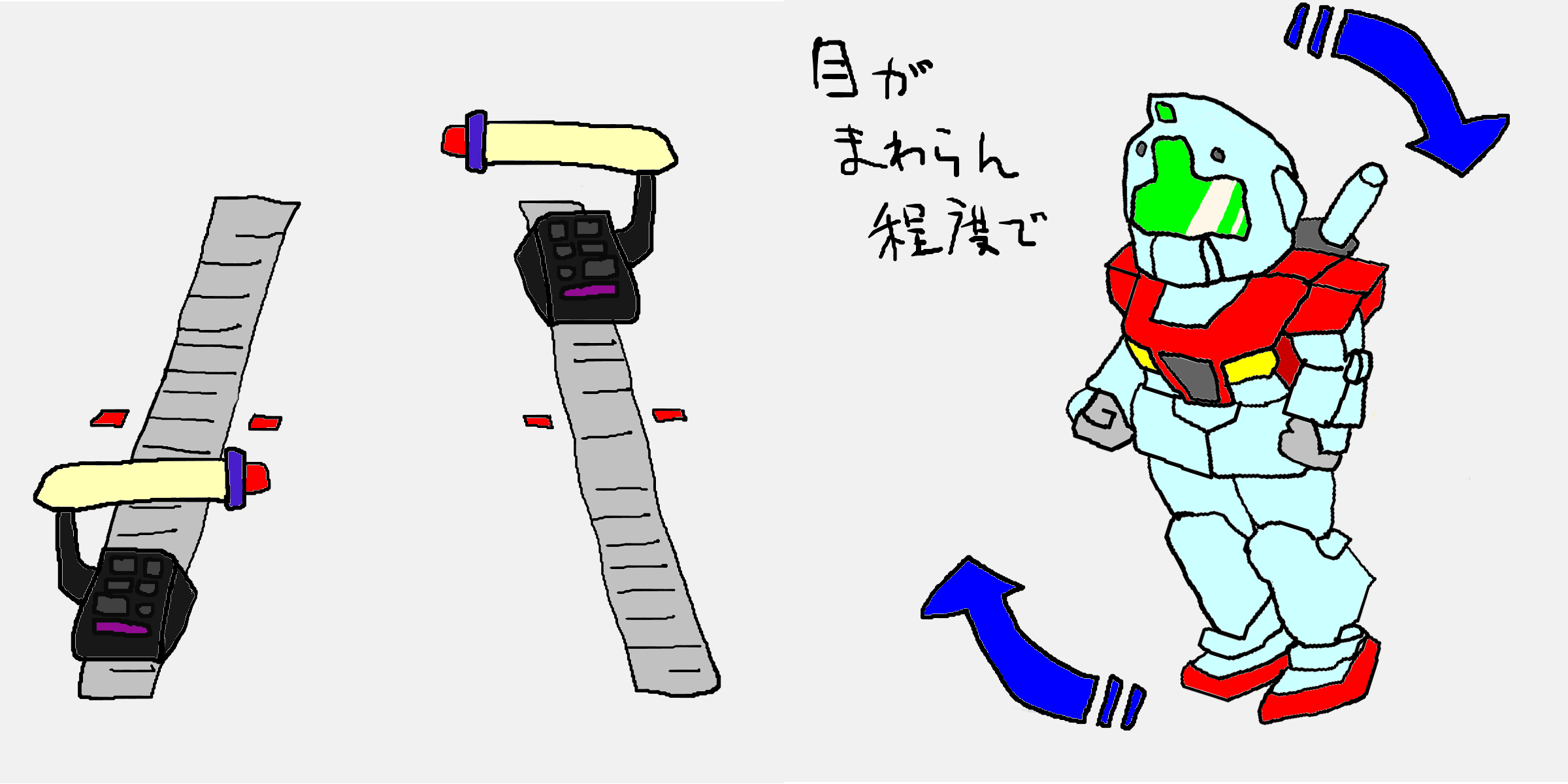
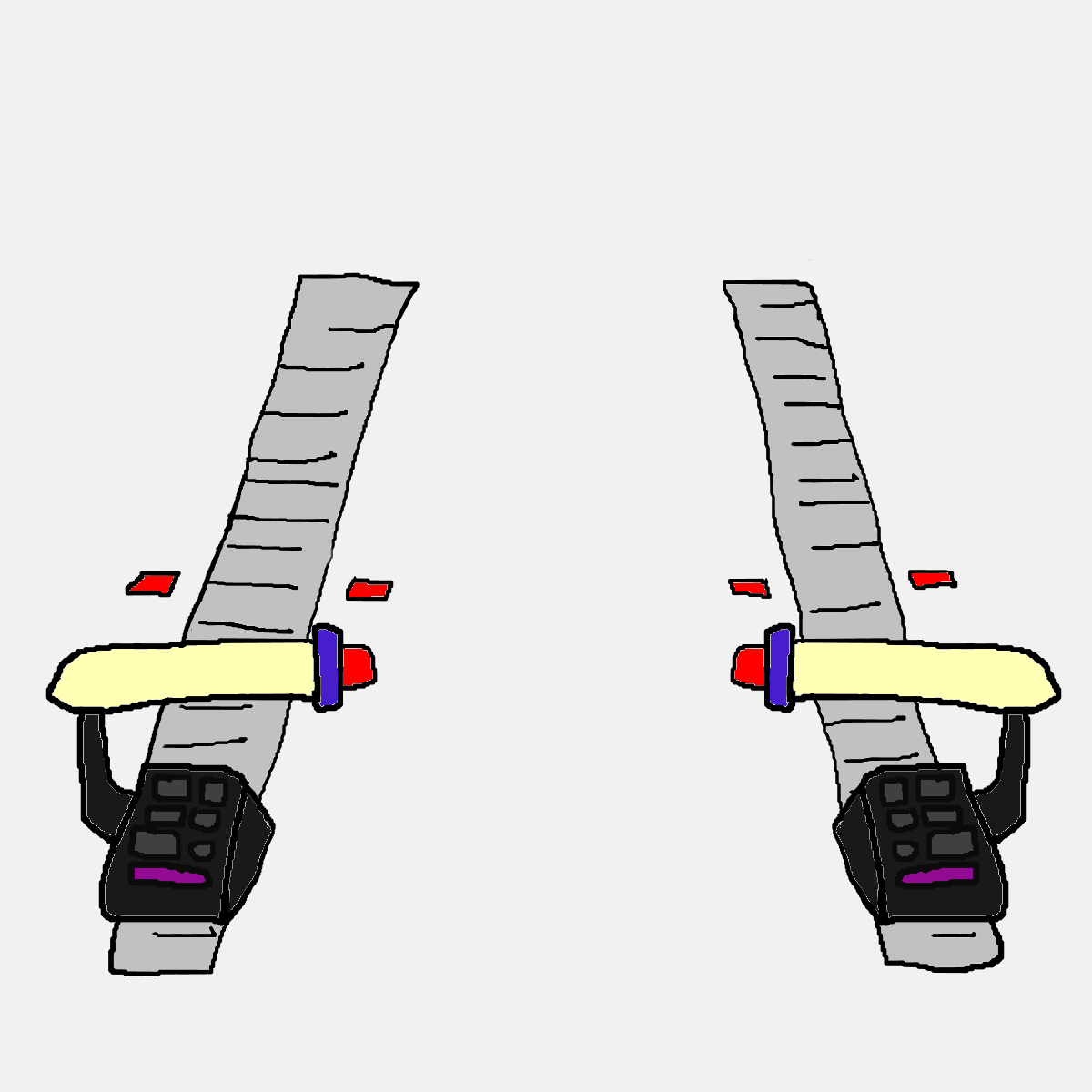
左右のレバー(操縦桿)
これらレバーは前後に動かす事が出来る、いわゆる操縦桿です。
車で言うならばハンドルの役割ですね。
これを左右組み合わせて動かす事で動作を指示します。

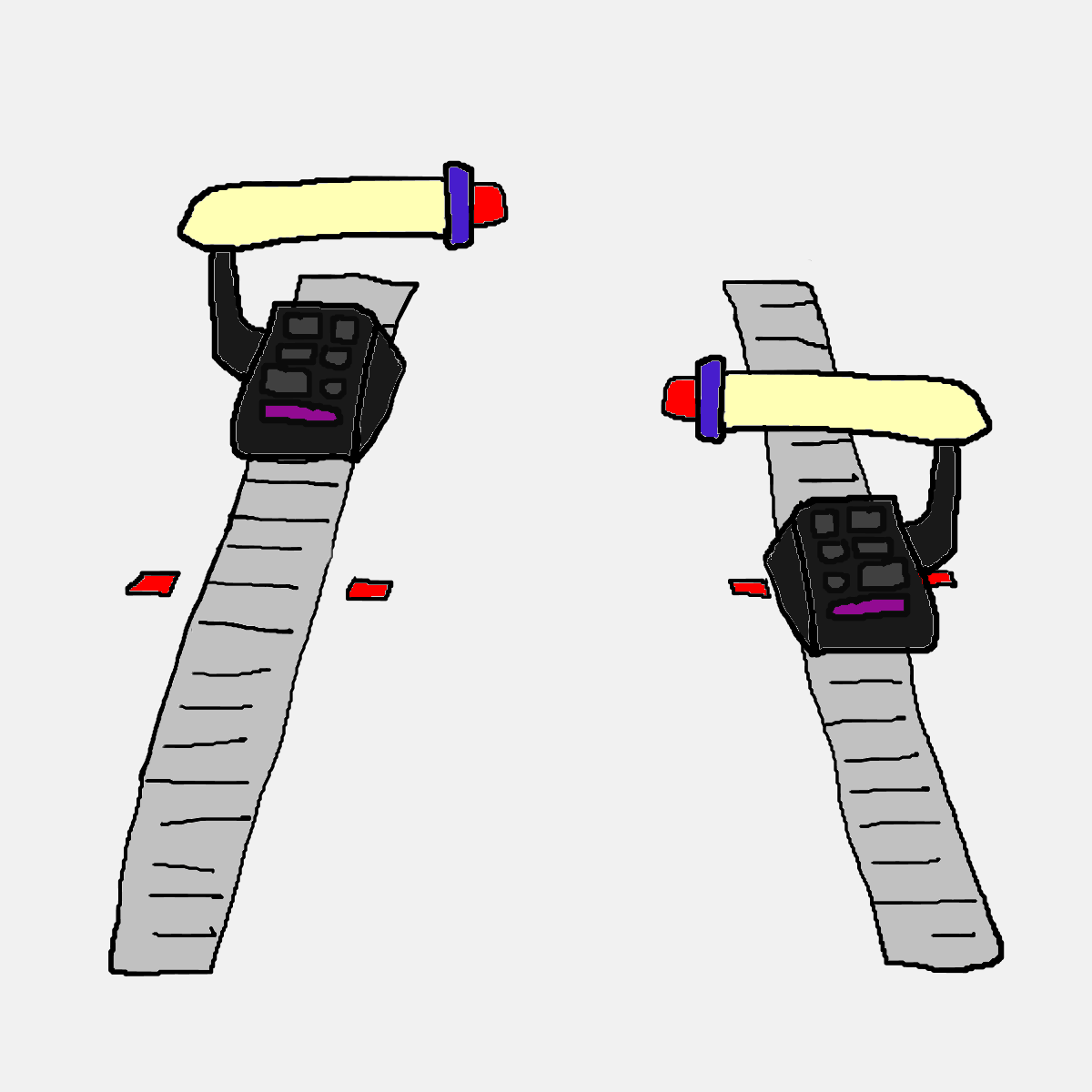
諸説あるケド、キっとコんな感じダヨ。
ただ、このレバーは動きたい方向を指示するだけなので、クルマで言うアクセルを踏まなければなりません。
足元のペダル

右のペダルは前進を指示します。
つまりアクセルの役割。
上記した操縦桿の組み合わせに動きを与えます。
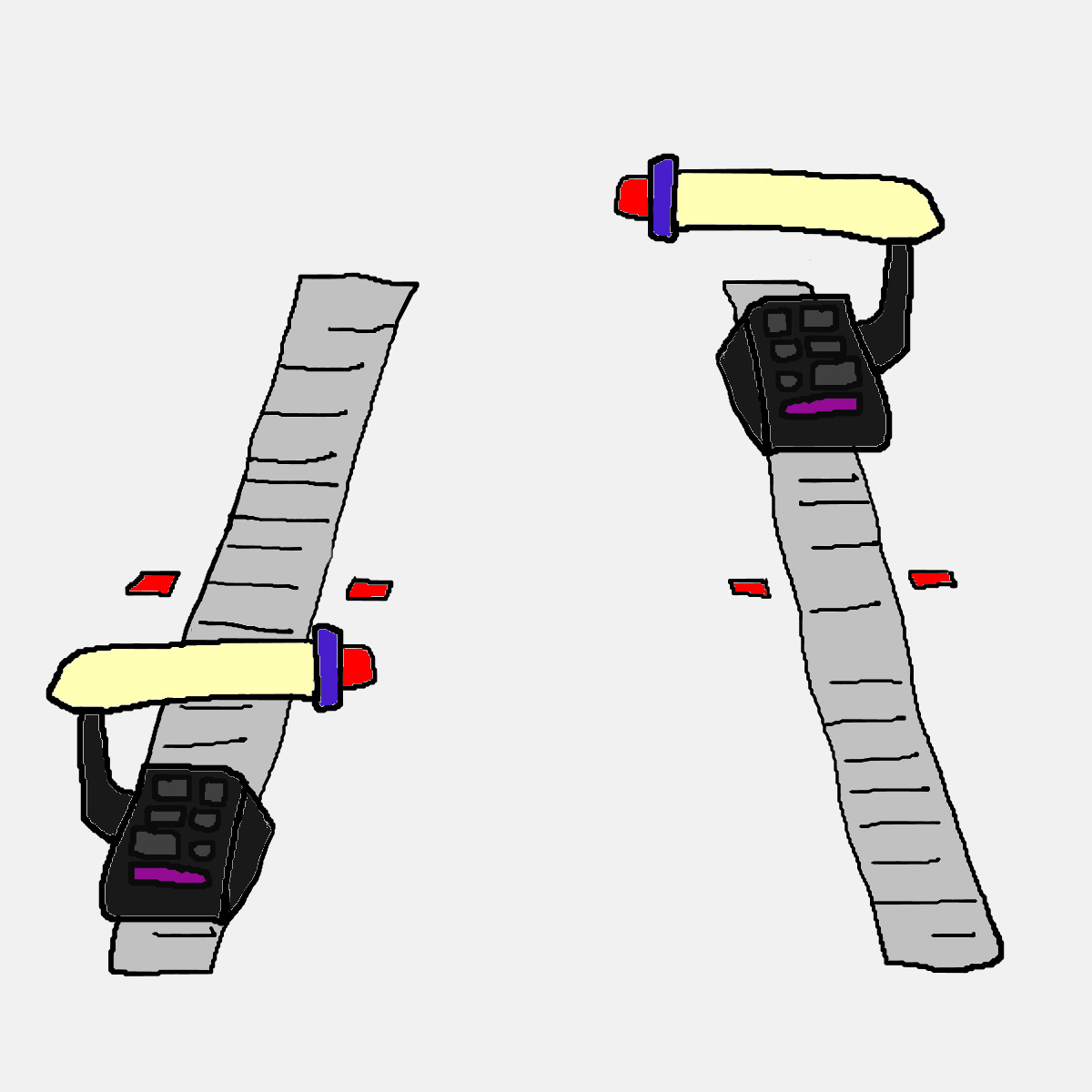
踏み込み度合いによってパワーの伝達をオペレーションシステムが調整。
ダッシュしたり、スラスターの併用等を状況に合わせて判断します。
一方、反対の左のペダルはブレーキの役割でもありますが、深く踏み込むと逆噴射して後退します。
後進用のアクセルって感じカナ。
戦場の絆のとはちょっと違うネ。
その他の操作
トリガー

操縦桿のグリップ部分にはビームや武器の発射を決定する複数のトリガーやセレクターが付いています。
また、指の動きを感知するセンサーを兼用するタイプもある様です。
マニュアルでモビルスーツのマニュピレーター(指)の操作をする時に必要な装置ですね。
操作盤(コンソール)
火器管制等の、戦闘中に多用するものは操縦桿の近くに配置されています。
モードの切り替えや通信・燃料系、ジェネレーター関連のスイッチも配置されていて、前面のモニターに状況や状態が表示される様になっています。
まとめ・考察
モビルスーツの操作について記述しました。
万能性を持つモビルスーツは、制圧時などに四肢やマニュピレーター(指)を駆使した作業用ロボットとして利用する事があり、モードを切り替えてマニュアルで動かします。
作業時は戦闘時に比べ 目まぐるしく動き回る事はないので、必要な作業に対し足を止めて それこそ建設重機の様な操縦を行います。
この作業時にはニュータイプもオールドタイプも関係ないですね。
しかし、一方の戦闘時の操作をちょっと想像してみると、
- 状況把握
- 決断
- 行動
が必要です。
これが ニュータイプになると、
- そこに居るだけで感じれちゃう
- 決断
- 行動
つまり、①のプロセスを省略できる訳ですね。
逆襲のシャアでは、コックピットに居たクェスに、戦場の状況が次々と入り込んでしまって気分が悪くなる描写があります。

クェス・パラヤ
パイロットの適正を短期間で示しましたが、戦争の道具にされ戦死してしまいました。。
ニュータイプはそこに居るだけで、意図せずとも状況を理解しイメージが出来てしまうのです。
一番手間の掛かる、狭くて暗いコックピットの中でキョロキョロしながら状況を把握するプロセスを省けるのは、大きなアドバンテージと言えます。
また ニュータイプは、

ビームをも避けてしまう反応速度の速さ!
と言われる事があります。
おそらく 動き出しがめちゃくちゃ速いのでしょう。
しかし これは、
- 反射
ではなく、イメージに基づく的確な、
- 予測
と考えられます。
次はこうなる、こう動くとかが感覚的に分かってしまうのですね。
それで ニュータイプに覚醒したアムロに、マグネットコーティングを施されたガンダムをあてがえば活躍出来ない訳がない!
やはり戦場に於いて無敵の存在かもしれませんね。
すんません。
以上、余談でした~。
※本記事の内容は様々な諸説あるうちの一つです。
公式な物では無く、ガンダム入門塾の見解として記述していますのでご了承下さいね。







よく見ました。旋回せずに左にすぐに動くのはどのように操作か?
https://youtu.be/sUg3r9-sMYg?t=3m54s
Choさん
コメントありがとうございます。
旋回せずにスライドする感じですねー。
さて。どうでしょう。。
出来る操作はそう多くありませんので、コメント見て下さっている方々の あぁでもないこうでもないのご意見も欲しいです~。
右にスライド→左レバーを上、右を中立、ペダル両踏みとか。
一年戦争第1話「ガンダム大地に立つ!」では、アムロが目の前にいたザクに対して反射的に押した、両レバーのボタンがバルカン砲の引き金になってましたね。
ASさん
コメントありがとうございます。
ビームライフルを撃つときも同じそのボタンが押されるのだと思うのですが、どこかに切り替えようのセレクターがあるのでしょうね。
ビームライフルを所持していない時は自動的に頭部バルカンのモードになっているのかも。
それとも右のボタンがビームライフルで、左がバルカンとか。
んー。謎。
20年ぐらい前にバンダイ系のアンソロ系の雑誌かなんかで発表されていた操縦法とは全く違いますね。
にわかの称号をあたえます。
雑誌の名前言えないにわか発見、そもそも当時は形を再現することも、側を作って四肢を動かすことすらできない古い時代のものを参考にしたってぶっちゃけ今は説得力ないでしょ、後付け設定なんてガンダムという作品で言ったら今更だし
時代ごとに変わってくんだから、なんだっていいじゃんかっつう
ちなみにUCの最初の方に結構参考になるシーンがある、だから戦場の絆と合わせて考察ってことにした方がいいとおもうよ、んで説明しきると戦場の絆はコックピットを模した操作盤を使って実際に戦闘が出来てるから本当にMSを作ったら戦場の絆とアニメや漫画で描写されてる操作盤とのハイブリッドになると僕は思うよわかんないけどね、だって実際に作ったらもしかするとフルメタル・パニックみたいなのが1番効率と実用性をかねてるからこちらが採用されるかもしれないし。要はありもしない技術に20年前の古い雑誌や個人の固定概念が絶対になるわけない公式も完璧な設定を公式として用意しているわけでもないし。だからふわっとした考察にとどめるべきよこの議題は。
最初のザクなんてレバーじゃなくてハンドルなんだぞ、いいか車のようなハンドルだぞ、最初にでた映像化された物が公式と言ってるバンダイ基準でいったらザクのコックピットがハンドルになるんだぞ
だからふわっとしたのでいいんだよ
以上わっかりずらい長文ごめんなさい
指摘おじさん
コメントありがとうございます。
にわかの称号で無問題(笑)。
20年前のその雑誌にはたどり着けなかったので、どうにかして見てみたいですね。
短編のストーリーか何かのワンシーンにあったって事ですかね。
興味あるな~。
家庭用ゲーム機でも、2つのレバー+複数ボタンのコントローラーで大まかな動作は実現されてますから、不可能ではないかもですね。
とはいえ、第一話の、ザクの動力パイプを掴んで引き寄せた後押し出して、パイプを引き千切るガンダムの動作や、両手を組んでマチルダの乗るミデアに叩きつけるドムの動作(オルテガハンマーでしたっけ)などは、2つのレバーと2つのペダルでは再現できない気がしますね〜。
人並みの動作の完全な再現には、精神感応装置、ガンダムだとサイコミュですかね、あるいは機動武闘伝の操作系ようなものが要りそうですね。
(映画ファイアーフォックスのロシア語で思考せよ、を思い出してしまいます)
ぐるぐるさん
コメントありがとうございます。
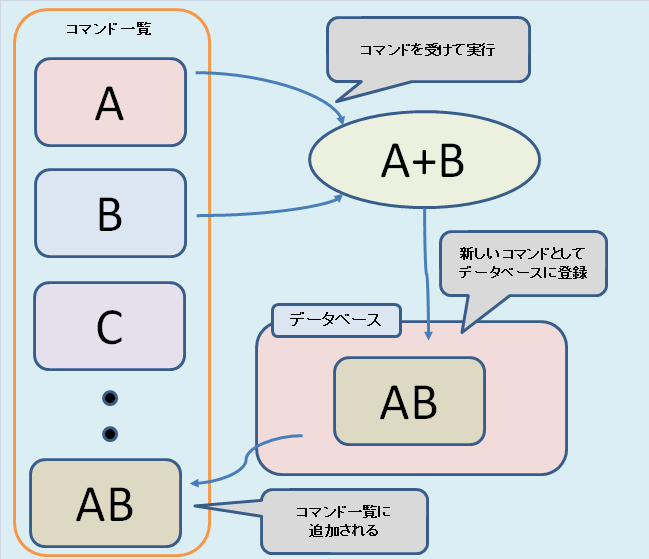
ガンダムによるザクの動力パイプ引きちぎりの件ですが、ガンダムに教育型コンピューターを搭載していたにせよ、実践データがほぼない中でのこのような動きは、さすがにコマンド蓄積されていないですよね。
もしくは、最初からプログラムされていて、コンピューター側からこのコマンドを提案してきたのか。
となれば、そんな格闘戦が想定されていたと言う事になりますが、プロレスの技がプログラミングされていて、コマンドがアイアンクローとかだったとか。
でも、最終的にビームサーベルでぶった切ってるので、コンピューターの提案があったとしたら、先ずはビームサーベルでしょ。
ビームサーベルも果て、完全無手の状態であれば、そんな提案があるかも知れませんが、これはやはり不自然ですね。
ドムのスレッジハンマーもプロレス技がプログラムされていたのかなぁ。
両軍とも、モビルスーツは格闘戦を想定していたので、意外にプロレスやボクシングやキックなどの立ち技系のプログラミングが積極的になされていた。
との解釈にしないと、戦闘中にマニュアルであの動きをするのは、酷でしょうね。。
うむぅ。悩ましや。。
モビルスーツはレバー押し出す動作ではなくレバーそのものを倒す引くことによって手を、平面的に動かすことができるはずですよ
ネカさん
コメント度々ありがとうございます。
この動きについては、操縦系をマニュアルにして動かしているのだと弊サイトでは考えています。
戦闘中は教育型コンピューターの支援を受け、ほとんどの動きやコマンドが補助されている、いわばオートマの状態だと思うのです。
劇中にもレバーを使って手足を動かす描写はあったかと思いますが、戦闘中ではなかったと思います。
比較的足が止まっているときや、非戦闘状態の時だと思います。
しかし、色々な考えや解釈があって然るべきだと思いますので、この様なコメントは大歓迎です!
コメントを見て下さっている皆さんのご意見も伺いたいですねー。
多分ペダルの部分は間違ってる、視点を変えずに左右に動けない、蹴る動作も説明がつかない
ネカさん
コメントありがとうございます。
このモビルスーツの操縦については、色々な考え方があり、何が正解か分からない点が多くあります。
その上で、弊サイトで考えるに、
蹴る動作については、別のコマンド指示で動いていると考えています。https://www.gundam-nyumon.com/neta/7043/
モビルスーツをあのペダルとレバーのみで動かすのは恐らく不可能だと考えますので、教育型コンピュータからのフィードバックがパイロットに届いている。のかな?
ちなみに、左右のハンドレバーは前後だけでなくロール動作もできる様ですよ
GX-7700さん
コメントありがとうございます。
このページの操作方法は塾長ピロスケなりの独自解釈です。
すなわち思考の限界もあり、いろいろな情報やご意見を頂くのはありがたいです!
ロールですねー
コメントに出てきた第1話の「パイプ引きちぎり」シーン.
MSがもともと作業機械であったと考えると,何かをつかんで引き寄せるという動作は
汎用動作でありそうな感じはしますね.
モビルワーカーの技術を持っていたのがジオンだけってのは考えにくいですし.
むしろ,戦闘動作に関する知見がなかった初期の連邦だからこそ
モビルワーカーの動作プリセットをとりあえず入れておいたとも考えられそう.
(特にトラブルがなければガンダムの初仕事って
「操作になれるためにホワイトベースに物資を運び込む」だったんじゃないかなと)
あと,操縦で印象的なのがF91の出撃シーンでビームライフルを取るシーン.
「直前になったらオートでやるんだよ!」
ってメカニックに怒鳴られてたやつ.
ああいった感じで大まかな動作を人間が入力し,
そこから意図をくみ取ったOSが最終調整を行うというのが現実的かな
(というか,現実の産業用ロボットも似たような操作方法が研究されていますし)
そう考えると,アムロはガンダムの手をザクの方に伸ばしてスクリプトを実行する.
ガンダムのOSは画像から手先にあるつかめそうな「何か」に合わせて指や関節を微調整してつかむ→引き寄せる.
この動作が結果として「引きちぎる」に見えた,と解釈できそう.
あおざかなさん
コメントありがとうございます。
なんだかんだで、マニュアル操作では動力パイプ引きちぎりは解釈がむずかしいので、気の利いたOSが存在したという事に落ち着きそうですね。
ガンダムの世界は、現世紀が2040年代に終わり、宇宙世紀に入って79年後に戦争が勃発するのですが、すなわち2024年現在をベースに考えるならば、おおよそ100年後になります。
となれば、産業用ロボットは現在の技術をはるかに凌駕し、詳細に器用な動きが出来ていると考えるのは不自然ではないですね。
ならば、わざわざパイロットを搭乗させる? という議論が次に出てきそうな。。
暇なので
PS5のコントローラーで
モビルスーツを意のまま操作できるキーアサインを考えて見ました。
– [ ] 今後PS5で発売されるであろうガンダムゲームのキーアサインを暇なんで、考えてみた
– [ ] コントローラーに無理矢理詰め込んでみた。
– [ ] 操作の簡素化は無視です。
– [ ] かなり複雑。
– [ ] シミュレーターに近い。
– [ ] モビルスーツを思い通りに動かす事に重きを置いてます。
– [ ] テストプレイを繰り返し
– [ ] フィードアップを繰り返す。
– [ ] 後にブラッシュアップ
– [ ] 修正すべき所があれば教えて下さい
– [ ] コントローラのキーアサイン
– [ ] 宇宙空間
– [ ] 搭乗機体例 ゼータガンダム
– [ ] 兵装種類
– [ ] 1 ①ビームライフル 射属性
– [ ] ①防御時 シールド受け、払い
– [ ] ②ロングビームサーベル 格属性
– [ ] ②防御時 銃剣 受け、払い
– [ ] 2 ①ビームサーベル 格属性
– [ ] ①防御時 サーベル受け、払い
– [ ] 3①グレネードランチャー 射属性
– [ ] ②グレネードワイヤー 格属性
– [ ] ①②防御時 シールド受け、払い
– [ ] 4①頭部バルカン砲 射属性
– [ ] ②パンチ、キック 格属性
– [ ] ①②防御時 シールド受け、払い
– [ ] 5①メガビームランチャー 射属性
– [ ] ①防御時 シールド受け、払い
– [ ] ②メガビームランチャー銃剣 格属性
– [ ] ②防御時 銃剣 受け、払い
– [ ] 6 ①シールド 打突、払い等々
– [ ] ①防御時 シールド受け、払い
– [ ] [モーションコントローラー
– [ ] 機体360度回転、左右ロール]
– [ ] [左スティック
– [ ] 前後進 左右移動]
スティックを倒す強弱でスピード調整
– [ ] [右スティック
– [ ] 機体360°旋回]
– [ ] スティックを倒す強弱でスピード調整
– [ ]
– [ ] [AMBAC
– [ ] パイロット目線👁️🗨️中心サークルに左スティック↑ + R3ボタン押し込みで視点サークル方向に パイロット目線はそのままで機体方向転換 ]
– [ ] [ L2ボタン弱押しシフト +右スティック
– [ ] カメラ(索敵モード) でパイロット目線 360°回転]
– [ ]
– [ ] [ L2シフト強押しシフト+右スティック
– [ ] エイム
– [ ] 武器レティクル →機体の順に360°旋回
– [ ] 機体旋回速度はやや遅め
– [ ]
– [ ] [R2ボタン
– [ ] スラスター]
– [ ] 押す強さで強弱
– [ ] [R1ボタン
– [ ] 兵装 A攻撃]
– [ ] 例 ビームライフル
– [ ] [L1ボタン
– [ ] 兵装B 攻撃]
– [ ] 例 ビームサーベル
– [ ] [L3ボタン
– [ ] 兵装C攻撃] 固定兵装
– [ ] あらかじめ 使用したい兵装をオプション画面で設定しておく。
– [ ] 例 バルカン砲
– [ ] 近接格闘や射撃時、L1ボタン、R1ボタンの押す長さで強弱。
– [ ] 強 ビームの照射やサーベルの押し当て溶断など
– [ ] [R3 ボタン 姿勢制御
– [ ] 慣性状態のブレーキ
– [ ] 長押しで(機体の頭部位置をMAP開始時の天頂方向)に戻す ]
– [ ] [△ボタン 防御行動
– [ ] L1とR1の兵装での攻撃と防御の切り替え ]
– [ ] 兵装ごとに防御スタイルは異なる
– [ ] シフト + R2 スラスター+スティックの任意方向で緊急回避
– [ ] [○ボタン 多機能アクションボタン]
– [ ] 目標物の掴み等々
– [ ] [⬜︎ボタン 上昇 (重力化ではスラスター ジャンプ]
– [ ] スラスター併用で速度調整
– [ ] [×ボタン かがみ、長押しで伏せ
– [ ] L2ボタン スラスター シフト併用で下降 ]
– [ ] 伏せ状態だと宇宙や海中では巡航体系となり、移動速度が上がる
– [ ] [タッチパッド↑ オートモード(オートラン)のON OFF切り替え]
– [ ] 戦略MAP 及び ロックオンした対象物や敵機、僚機を自動的に移動、追尾
– [ ] オート移動中でも操作は可能
– [ ] [タッチパッド←機体左ロール]
– [ ] [タッチパッド→ 機体右ロール]
– [ ] [タッチパッド↓ 視点 変更切り替え]
– [ ] [タッチパッド↘︎]機体視点 やや右向き]
– [ ] [タッチパッド↙︎ 機体視点 やや左向き]
[ タッチパッド スワイプ操作
簡易チャット、テキストチャット、救難信号発信(給弾、援護、サブフライトシステム呼び出し等) ]
– [ ] [十時キー↑ロックオン]
– [ ] シフト+他ボタン等で
– [ ] マルチロック等
– [ ] [十時キー↓
– [ ] シフト +右スティック上下
– [ ] 画面上のMAP拡大縮小]
– [ ] [シフト + △ボタン
– [ ] 機体若しくはパイロットの固有スキル発動]
– [ ] [シフト + ⬜︎ボタン
– [ ] 精密射撃 スコープモードに切り替え]
– [ ] 精密射撃時はL2 エイムボタン強弱でスコープの拡大縮小
– [ ] [シフト + Xボタン
– [ ] 変形等切り替え]
– [ ] シフト + ○ボタン長押し
– [ ] 機体乗り降り]
– [ ] [十字キー←兵装Bのセレクト等]
– [ ] シフト + 右スティックでL1で使用する兵装をセレクト
– [ ] シフト + ⬜︎ボタンで対象装備のリロード等
– [ ] シフト + △ボタンで対象装備を射撃属性に変更
– [ ] シフト + ◯ボタンで対象装備を格闘属性に変更
– [ ] シフト + Xボタンで対象装備の廃棄
– [ ] 武器の使用不能やデッドウェイト解消のため
– [ ] [十時キー→兵装Aのセレクト]
– [ ] 上記載の兵装Bと同じ
– [ ] [スタートボタン
– [ ] •戦略MAP 表示
– [ ] 自身の行動目的や行軍ルートを地図に入力、僚機と共有。
– [ ] •スコアボード ]
– [ ] ・初心者向け簡易操作の
– [ ] カジュアルモードの実装
– [ ] •キーカスタマイズの充実
– [ ] ・チュートリアルの充実必須
スズさん
コメントありがとうございます
詳細に検討され、覚え込むのに大変でしょうが人の汎用性を模したモビルスーツを人なりに動かすのであればコマンドとしてはまだまだ不足なのでしょうね。
モビルスーツのオペレーションシステムにしろ、ゲームの設計者にしろ、オートで対応すべき動きをプログラミングするのは大変ですねー